Throughout the Spring Semester of 2023, I completed Mechanical Design Fundamentals Studio 1. As part of this, I engaged in a collaborative group project to design and build a robot to complete the Warman Design and Build Challenge 2023.
Throughout the project, I developed in the following areas:
Project management – I was the team’s project manager.
Conceptualising a problem – Using different methods of understanding and breaking down a problem.
Ideation to solve a problem – Applying various strategies to brainstorm, confer, and compare ideas to address an engineering problem.
Prototyping and agile development – Rapid functional prototyping guided design and drove development.
Presentation and communication of ideas – Gaining experience through formal presentations, communicating the team’s work to a panel of engineers.
Reflection and introspection – Receiving feedback from engineering panels, mentors, and peers to apply to the design process.
The Challenge
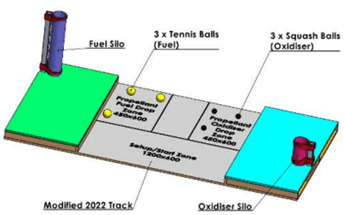
The Warman Design & Build Challenge 2023 sets the following premise. The Gondwanans, inhabitants of a small planet in the Milky Way, require assistance with the safe handling of their rocket fuel and oxidizer storage vessels. Earth engineers are requested to design a system to collect the storage vessels from their designated drop zones and deposit them into the appropriate storage silos.
The Robot
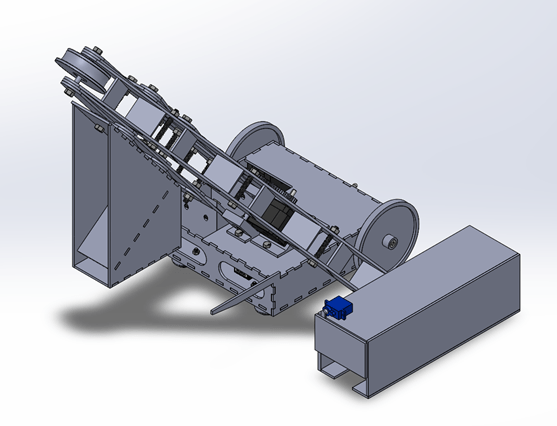
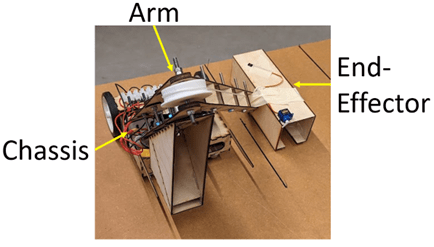
The team produced a robot consisting three subsystems.
My Contribution
My role in this was as the Project Manager and Chassis system engineer. My responsibilities included:
- Assign and track tasks and deliverables.
- Update the team’s project timeline (Gantt chart) and task tracking (Trello).
- Prepare and chair weekly meetings.
- Maintaining agreed platforms for communication and collaboration (i.e. Facebook messenger and Microsoft Teams).
- Design and manufacture the chassis subsystem.
- Design and assemble the electrical systems.
- Lead the development of an integrated mechatronic control system.
Chassis Subsystem
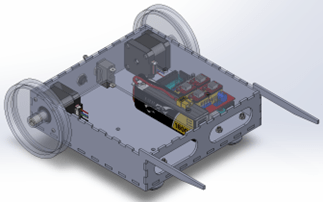
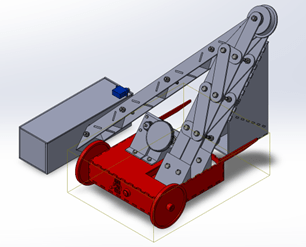
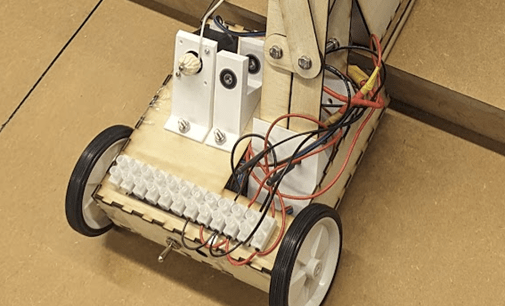
The chassis was to provide a sturdy platform to mount the other subsystems and provide movement across the surface of the competition track. The design and manufacture of this subsystem was my responsibility. Over three prototype iterations, I delivered the following chassis made from finger jointed laser cut plywood sheets.
Mechatronic Control System
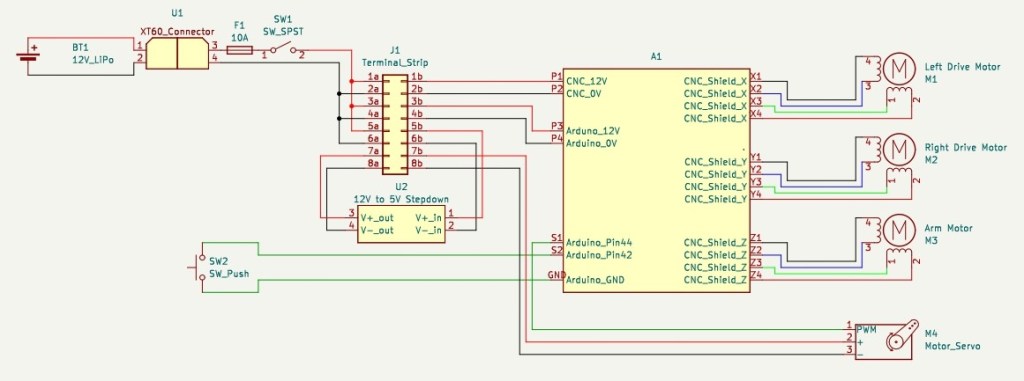
The design and assembly of the electrical and mechatronic control systems were also my responsibility as it was considered part of the Chassis Subsystem.
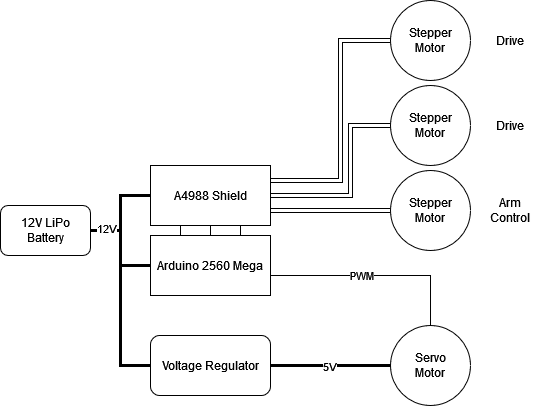
A component selection process lead to the procurement of a 11.1V LiPo battery (to comply with lab safety guidelines), and an Arduino Mega paired with a A4988 shield (due to a suitability for driving stepper and servo motors and ready availability) as the basis for power and control respectively. These components were then integrated with the various actuators on the other subsystems.
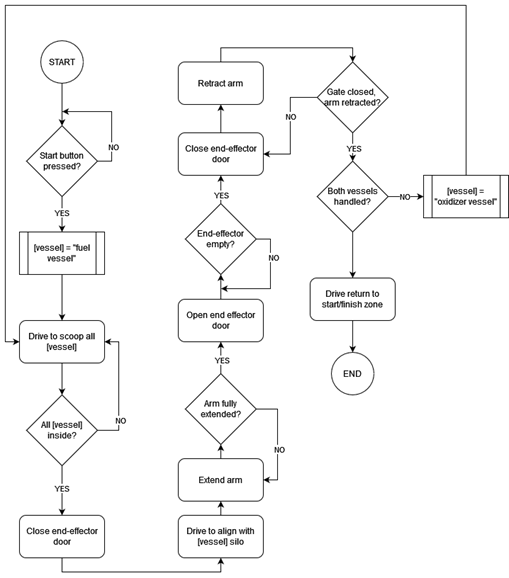
I also planned and developed the controller software as represented by the following process flow diagram.
Project Management
I assumed the following responsibilities as project manager:
- Maintenance of the project timeline and planning tools (Gantt chart and Trello).
- Coordinating the group’s communication channels (Facebook messenger, Microsoft Teams, Weekly meetings).
- Organisation of collaboration and sharing platforms (shared One Drive).
- Keeping updated with the team’s activities and tasks.
- Helping ensure individuals can complete tasks by managing resources.
- Responsibility for presenting the team’s progress and plan to mentors and markers.
- Ensure assessable group submissions are made on time.
